一,、帶頭人與團隊介紹
王世全 博士 研發(fā)中心主任
- 負責研發(fā)中心整體運營管理及產(chǎn)品設計
- 斯坦福大學機器人實驗室博士,10年以上機器人研發(fā)經(jīng)驗

葉熙陽 博士 研發(fā)中心首席技術官
- 負責機器人底層硬件及控制系統(tǒng)研發(fā)
- 斯坦福機器人實驗室博士,,10年以上經(jīng)驗,,曾任職于新加坡科技研發(fā)局

鐘書耘 博士 研發(fā)中心首席機器人科學家
- 負責機械臂規(guī)劃算法、軟件架構及仿真平臺研發(fā)
- 斯坦福機器人實驗室博士后,15年以上機器人智能規(guī)劃及人機協(xié)作等研發(fā)經(jīng)驗

丁志豪 博士 研發(fā)中心副主任研究員
- 負責自適應產(chǎn)線的研發(fā)
- 佐治亞理工學院運籌學博士,,8年以上效率優(yōu)化經(jīng)驗,,曾任Facebook數(shù)據(jù)科學家
二、 總體定位與發(fā)展方向
中心專注于研發(fā),、生產(chǎn)集高精度力控,、計算機視覺和人工智能技術于一體的自適應機器人產(chǎn)品,在實際應用中面向終端客戶提供一站式的,、端到端的解決方案,。通過賦能終端用戶,降低機器人自動化的應用成本,,在提升生產(chǎn)效率的同時,為客戶帶來更多實際價值,。
三,、 科研成果與產(chǎn)品展示
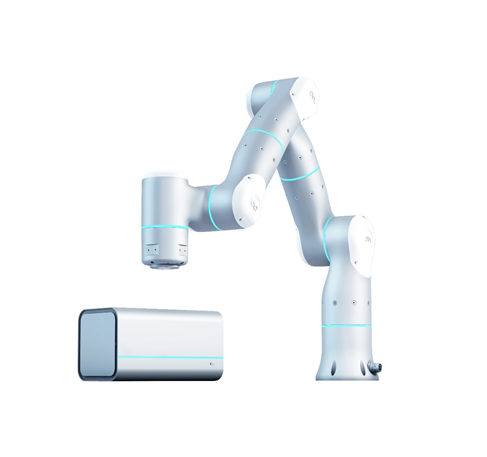
Rizon 4 拂曉4
作為世界上首臺自適應機器人,Rizon拂曉深度融合了高精度力控,、機器視覺和AI,,可以適應不確定的工作環(huán)境,通過像人一樣的手眼配合來完成復雜的工作任務,,極大地提高了機器人的靈巧,、智能和柔性通用程度,進而增強生產(chǎn)過程中的柔性和生產(chǎn)力,,替代難以自動化的人工環(huán)節(jié)和升級低柔性的自動化產(chǎn)線,。自適應機器人具備以下三個特性:位置誤差容忍度高,抗干擾能力強,,智能可遷移,,從而能夠做到對操作對象、環(huán)境和任務的自適應,。

自適應機器人曲面打磨應用
自適應機器人所獨具的高精力覺感知及快速響應能力,,有效地去除木材表面毛刺、油污,、灰塵等,,兼顧表面的光滑度和附著力。針對不同材質(zhì)及不同表面紋理的打磨,,自適應機器人兼容性適配多種打磨工具,。

自適應機器人力控裝配應用
自適應機器人具備獨特的高精力覺感知能力,可以對零部件(尤其精密零部件)裝配過程中的微小力覺變化做出準確及時的反應,,有效保證裝配質(zhì)量和效率,。
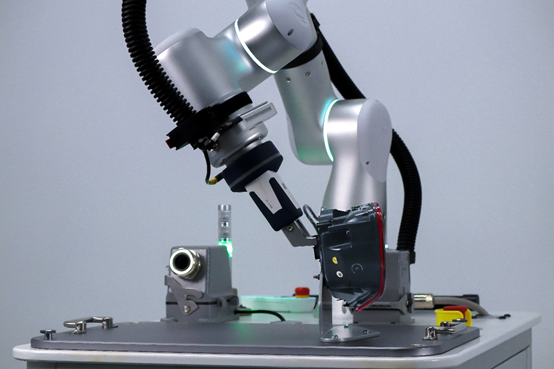
自適應機器人帶線束插拔應用
憑借高響應度力覺系統(tǒng),結合世界領先的AI視覺,可以在不借助外界輔助裝置的情況下,,在復雜環(huán)境中識別插頭型號和位置姿態(tài),,自動引導避讓障礙物,完成抓取和插拔裝配工作,。
四,、聯(lián)系我們
深圳清華大學研究院自主式機器人研發(fā)中心
聯(lián)系人:佘鳳珠
電話:15920333020
地址:深圳市南山區(qū)科技園南區(qū)南七道深圳清華大學研究院C508